 |
 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Modbus –∏ stm32
–ê–≤—Ç–æ—Ä: –ê—Ä—Ç—ë–º –¢—è–Ω—É—Ç–æ–≤, artem.lab@gmail.com –í–≤–µ–¥–µ–Ω–∏–µ –ó–¥—Ä–∞–≤—Å—Ç–≤—É–π—Ç–µ, –∫–æ—Ç—ã! –ù–µ—Ä–µ–¥–∫–æ –≤–æ–∑–Ω–∏–∫–∞–µ—Ç –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ—Å—Ç—å –≤ –æ–±—â–µ–Ω–∏–∏ –º–µ–∂–¥—É –∫–∞–∫–∏–º-–ª–∏–±–æ –Ω–∞—à–∏–º —É—Å—Ç—Ä–æ–π—Å—Ç–≤–æ–º –∏ –∫–æ–º–ø—å—é—Ç–µ—Ä–æ–º. –°–∞–º—ã–π –ø—Ä–æ—Å—Ç–æ–π –∏ –¥–æ—Å—Ç—É–ø–Ω—ã–π –¥–ª—è —ç—Ç–∏—Ö —Ü–µ–ª–µ–π –∏–Ω—Ç–µ—Ä—Ñ–µ–π—Å - UART, –∏–º–µ–µ—Ç—Å—è –ø–æ –Ω–µ—Å–∫–æ–ª—å–∫–æ —à—Ç—É–∫ –≤ –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–∞—Ö, –∑–∞–≤—Å–µ–≥–¥–∞—Ç–∞–π –≤ –∫–æ–º–ø—å—é—Ç–µ—Ä–∞—Ö (–Ω–∞ –∫—Ä–∞–π–Ω–∏–π —Å–ª—É—á–∞–π –∫–∞–∫ USB –∞–¥–∞–ø—Ç–µ—Ä), –∞ –µ—Å–ª–∏ –Ω—É–∂–Ω–∞ —Å–≤—è–∑—å –Ω–∞ –Ω–µ–∫–æ—Ç–æ—Ä–æ–º —Ä–∞—Å—Å—Ç–æ—è–Ω–∏–∏ - –º–æ–∂–Ω–æ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å RS-485. –í –ø—Ä–æ—Å—Ç–µ–π—à–µ–º —Å–ª—É—á–∞–µ –º–æ–∂–Ω–æ –æ–≥—Ä–∞–Ω–∏—á–∏—Ç—å—Å—è –ø—Ä–æ—Å—Ç—ã–º stdio (printf, scanf), –ø–µ—Ä–∏–æ–¥–∏—á–µ—Å–∫–∏ –≤—ã–≤–æ–¥—è—â–∏–º, –Ω–∞–ø—Ä–∏–º–µ—Ä, —Ç–µ–∫—É—â—É—é —Ç–µ–º–ø–µ—Ä–∞—Ç—É—Ä—É, –æ–±–æ—Ä–æ—Ç—ã, —Å–æ—Å—Ç–æ—è–Ω–∏–µ –∏ —Ç.–ø. –∏ –ø—Ä–∏–Ω–∏–º–∞—é—â–∏–º —Ç–µ–∫—Å—Ç–æ–≤—ã–µ –∫–æ–º–∞–Ω–¥—ã (–Ω–∞ –º–∞–Ω–µ—Ä AT-–∫–æ–º–∞–Ω–¥ –º–æ–¥–µ–º–∞). –ü–æ –º–µ—Ä–µ —Ä–æ—Å—Ç–∞ —á–∏—Å–ª–∞ –∫–æ–º–∞–Ω–¥ –æ–±—Ä–∞–±–∞—Ç—ã–≤–∞—Ç—å –≤—Å—ë —ç—Ç–æ —Å—Ç–∞–Ω–æ–≤–∏—Ç—Å—è —Ç–µ–º –µ—â—ë —É–¥–æ–≤–æ–ª—å—Å—Ç–≤–∏–µ–º, –∫–∞–∫ –ø–æ —É–¥–æ–±—Å—Ç–≤—É, —Ç–∞–∫ –∏ —Å–∫–æ—Ä–æ—Å—Ç–∏, –Ω—É –∏ –¥–æ–±–∏–≤–∞–µ—Ç —Ç–∞–∫–æ–π –º–µ—Ç–æ–¥ –æ–±—â–µ–Ω–∏—è –æ—Ç—Å—É—Ç—Å—Ç–≤–∏–µ –ø—Ä–æ–≤–µ—Ä–∫–∏ —Ü–µ–ª–æ—Å—Ç–Ω–æ—Å—Ç–∏ –ø–æ—Å—ã–ª–∫–∏ (–∫—Ä–æ–º–µ —á—ë—Ç–Ω–æ—Å—Ç–∏ UART) –∏ –∞–¥—Ä–µ—Å–∞—Ü–∏–∏. –í –∏—Ç–æ–≥–µ –º—ã —Ç–∞–∫ –∏–ª–∏ –∏–Ω–∞—á–µ –ø—Ä–∏—Ö–æ–¥–∏–º –∫ –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ—Å—Ç–∏ –ø—Ä–∏–º–µ–Ω–µ–Ω–∏—è –∫–∞–∫–æ–≥–æ-–ª–∏–±–æ —Ü–∏—Ñ—Ä–æ–≤–æ–≥–æ –ø—Ä–æ—Ç–æ–∫–æ–ª–∞, —É—Å—Ç—Ä–∞–Ω—è—é—â–µ–≥–æ –≤—Å–µ —ç—Ç–∏ –Ω–µ–¥–æ—Å—Ç–∞—Ç–∫–∏ –∏ —Å—Ç–∞–Ω–æ–≤–∏–º—Å—è —É —Ä–∞–∑–≤–∏–ª–∫–∏ - —á—Ç–æ-—Ç–æ —Å–≤–æ—ë –∏–ª–∏ –∂–µ —Å—Ç–∞–Ω–¥–∞—Ä—Ç–Ω–æ–µ. –ù–µ–ª—ë–≥–∫–∏–π –≤—ã–±–æ—Ä –ú–æ–∂–Ω–æ, –∫–æ–Ω–µ—á–Ω–æ, –∏–∑–æ–±—Ä–µ—Å—Ç–∏ —Å–≤–æ–π –≤–µ–ª–æ—Å–∏–ø–µ–¥, –Ω–æ –≤–µ–¥—å –Ω–∞–≤–µ—Ä–Ω—è–∫–∞ –¥–æ–ª–∂–Ω–æ –±—ã—Ç—å —á—Ç–æ-—Ç–æ –≥–æ—Ç–æ–≤–æ–µ –∏ —à–∏—Ä–æ–∫–æ –ø—Ä–∏–º–µ–Ω—è—é—â–µ–µ—Å—è? –Ý–∞–∑—É–º–µ–µ—Ç—Å—è, –µ—Å—Ç—å —Ü–µ–ª—ã–π –∑–æ–æ–ø–∞—Ä–∫ –ø—Ä–æ—Ç–æ–∫–æ–ª–æ–≤, —Ä–∞–∑–æ–±—Ä–∞—Ç—å—Å—è –≤ –∫–æ—Ç–æ—Ä–æ–º –¥–æ–≤–æ–ª—å–Ω–æ –Ω–µ —Ç—Ä–∏–≤–∏–∞–ª—å–Ω–∞—è –∑–∞–¥–∞—á–∞, –ø–æ—ç—Ç–æ–º—É –ø–æ–ø—Ä–æ–±—É–µ–º –ø–æ–¥–æ–±—Ä–∞—Ç—å —á—Ç–æ-–Ω–∏–±—É–¥—å, —á—Ç–æ –±—É–¥–µ—Ç –æ—Ç–∫—Ä—ã—Ç–æ, —É–Ω–∏–≤–µ—Ä—Å–∞–ª—å–Ω–æ –∏ —Å –∫—É—á–µ–π –¥–æ–∫—É–º–µ–Ω—Ç–∞—Ü–∏–∏. –¢–∞–∫–∏–º –ø—Ä–æ—Ç–æ–∫–æ–ª–æ–º –æ–∫–∞–∑–∞–ª—Å—è Modbus - –æ—Ç–∫—Ä—ã—Ç—ã–π –∫–æ–º–º—É–Ω–∏–∫–∞—Ü–∏–æ–Ω–Ω—ã–π –ø—Ä–æ—Ç–æ–∫–æ–ª, –æ—Å–Ω–æ–≤–∞–Ω–Ω—ã–π –Ω–∞ –∞—Ä—Ö–∏—Ç–µ–∫—Ç—É—Ä–µ –≤–µ–¥—É—â–∏–π-–≤–µ–¥–æ–º—ã–π. –ï–≥–æ –ø–æ–¥–¥–µ—Ä–∂–∏–≤–∞–µ—Ç –æ–≥—Ä–æ–º–Ω–æ–µ –∫–æ–ª–∏—á–µ—Å—Ç–≤–æ –≤—Å–µ–≤–æ–∑–º–æ–∂–Ω–æ–≥–æ –æ–±–æ—Ä—É–¥–æ–≤–∞–Ω–∏—è, –≤ —Å–µ—Ç–∏ –µ—Å—Ç—å –±–æ–ª—å—à–æ–µ –∫–æ–ª–∏—á–µ—Å—Ç–≤–æ –∏–Ω—Ñ–æ—Ä–º–∞—Ü–∏–∏, –≤ —Ç–æ–º —á–∏—Å–ª–µ –¥–æ—Å—Ç—É–ø–µ–Ω –æ—Ñ–∏—Ü–∏–∞–ª—å–Ω—ã–π PDF —Å –∏—Å—á–µ—Ä–ø—ã–≤–∞—é—â–µ–π —Å–ø–µ—Ü–∏—Ñ–∏–∫–∞—Ü–∏–µ–π. –Ý–∞—Å—Å–º–æ—Ç—Ä–∏–º —ç—Ç–æ—Ç –ø—Ä–æ—Ç–æ–∫–æ–ª –ø–æ–¥—Ä–æ–±–Ω–µ–µ. –ü—Ä–æ—Ç–æ–∫–æ–ª Modbus Modbus –±—ã–ª —Ä–∞–∑—Ä–∞–±–æ—Ç–∞–Ω –∫–æ–º–ø–∞–Ω–∏–µ–π Modicon –¥–ª—è –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–∏—è –≤ –µ—ë –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–∞—Ö —Å –ø—Ä–æ–≥—Ä–∞–º–º–∏—Ä—É–µ–º–æ–π –ª–æ–≥–∏–∫–æ–π. –í–ø–µ—Ä–≤—ã–µ —Å–ø–µ—Ü–∏—Ñ–∏–∫–∞—Ü–∏—è –ø—Ä–æ—Ç–æ–∫–æ–ª–∞ –±—ã–ª–∞ –æ–ø—É–±–ª–∏–∫–æ–≤–∞–Ω–∞ –≤ 1979 –≥–æ–¥—É. –ü–µ—Ä–≤–æ–Ω–∞—á–∞–ª—å–Ω–æ –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä—ã MODICON –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–ª–∏ –ø–æ—Å–ª–µ–¥–æ–≤–∞—Ç–µ–ª—å–Ω—ã–π –∏–Ω—Ç–µ—Ä—Ñ–µ–π—Å RS-232. –ü–æ–∑–¥–Ω–µ–µ —Å—Ç–∞–ª –ø—Ä–∏–º–µ–Ω—è—Ç—å—Å—è –∏–Ω—Ç–µ—Ä—Ñ–µ–π—Å RS-485. Modbus - —ç—Ç–æ, –∫–∞–∫ —É–∂–µ –±—ã–ª–æ —Å–∫–∞–∑–∞–Ω–æ –≤—ã—à–µ, –ø—Ä–æ—Ç–æ–∫–æ–ª –≤–∏–¥–∞ "–≤–µ–¥—É—â–∏–π - –≤–µ–¥–æ–º—ã–π" (master - slave). –¢–æ–ª—å–∫–æ –æ–¥–∏–Ω –≤–µ–¥—É—â–∏–π –º–æ–∂–µ—Ç –±—ã—Ç—å –ø–æ–¥–∫–ª—é—á–µ–Ω –∫ —Å–µ—Ç–∏ –∏ —Ç–æ–ª—å–∫–æ –æ–Ω –º–æ–∂–µ—Ç –∏–Ω–∏—Ü–∏–∏—Ä–æ–≤–∞—Ç—å –æ–±–º–µ–Ω –¥–∞–Ω–Ω—ã–º–∏ —Å –º–∞–∫—Å–∏–º—É–º 247 –≤–µ–¥–æ–º—ã–º–∏ —É—Å—Ç—Ä–æ–π—Å—Ç–≤–∞–º–∏ (–∞–¥—Ä–µ—Å–∞ 0 –∏ 248-255 –∑–∞—Ä–µ–∑–µ—Ä–≤–∏—Ä–æ–≤–∞–Ω—ã). –û–±–º–µ–Ω –¥–∞–Ω–Ω—ã–º–∏ –º–æ–∂–µ—Ç –æ—Å—É—â–µ—Å—Ç–≤–ª—è—Ç—å—Å—è –≤ –¥–≤—É—Ö —Ä–µ–∂–∏–º–∞—Ö:
–û–±—â–∏–π –¥–ª—è –≤—Å–µ—Ö —Ñ–∏–∑–∏—á–µ—Å–∫–∏—Ö —É—Ä–æ–≤–Ω–µ–π –ø–∞–∫–µ—Ç Modbus - Protocol Data Unit (PDU) —Å–æ—Å—Ç–æ–∏—Ç –∏–∑ –∫–æ–¥–∞ —Ñ—É–Ω–∫—Ü–∏–∏ (1 –±–∞–π—Ç) –∏ –¥–∞–Ω–Ω—ã—Ö (–¥–æ 253 –±–∞–π—Ç): –ü–∞–∫–µ—Ç—ã —Ä–∞–∑–¥–µ–ª—è—é—Ç—Å—è –ø–∞—É–∑–æ–π –≤ –ª–∏–Ω–∏–∏: –Ω–µ –º–µ–Ω–µ–µ 3.5 —Å–∏–º–≤–æ–ª–æ–≤ –ø—Ä–∏ –¥–∞–Ω–Ω–æ–π —Å–∫–æ—Ä–æ—Å—Ç–∏ –ø–µ—Ä–µ–¥–∞—á–∏. –í–æ –≤—Ä–µ–º—è –ø–µ—Ä–µ–¥–∞—á–∏ –ø–∞–∫–µ—Ç–∞ –Ω–µ –¥–æ–ª–∂–Ω–æ –±—ã—Ç—å –ø–∞—É–∑ –¥–ª–∏—Ç–µ–ª—å–Ω–æ—Å—Ç—å—é –±–æ–ª–µ–µ 1.5 —Å–∏–º–≤–æ–ª–æ–≤. –î–ª—è —Å–∫–æ—Ä–æ—Å—Ç–µ–π –±–æ–ª–µ–µ 19200 –±–æ–¥ –¥–æ–ø—É—Å–∫–∞–µ—Ç—Å—è –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å –∏–Ω—Ç–µ—Ä–≤–∞–ª—ã 1.75 –∏ 0.75 –º—Å, —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤–µ–Ω–Ω–æ. –ü—Ä–æ—Ç–æ–∫–æ–ª Modbus –æ–ø–µ—Ä–∏—Ä—É–µ—Ç —á–µ—Ç—ã—Ä—å–º—è —Å—Ç–∞–Ω–¥–∞—Ä—Ç–Ω—ã–º–∏ —Ç–∏–ø–∞–º–∏ –¥–∞–Ω–Ω—ã—Ö:
–î–æ—Å—Ç—É–ø –∫ –∫–∞–∂–¥–æ–º—É —ç–ª–µ–º–µ–Ω—Ç—É –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç—Å—è –ø–æ 16–∏-–±–∏—Ç–Ω–æ–º—É –∞–¥—Ä–µ—Å—É, —É–∫–∞–∑—ã–≤–∞–µ–º–æ–º—É –≤–Ω—É—Ç—Ä–∏ –¥–∞–Ω–Ω—ã—Ö —Ñ—É–Ω–∫—Ü–∏–∏, –Ω–∞—á–∏–Ω–∞—è —Å 0, —Ç–∞–∫–∏–º –æ–±—Ä–∞–∑–æ–º –º–æ–∂–µ—Ç —Å—É—â–µ—Å—Ç–≤–æ–≤–∞—Ç—å –¥–æ 65536 —ç–ª–µ–º–µ–Ω—Ç–æ–≤. –ü—Ä–∏—á—ë–º —á—Ç–æ –∏–∑ —Å–µ–±—è –ø—Ä–µ–¥—Å—Ç–∞–≤–ª—è–µ—Ç –∫–∞–∂–¥—ã–π —ç–ª–µ–º–µ–Ω—Ç —Å–ø–µ—Ü–∏—Ñ–∏–∫–∞—Ü–∏—è —É–º–∞–ª—á–∏–≤–∞–µ—Ç, —Ç.–µ. —ç—Ç–æ –º–æ–∂–µ—Ç –±—ã—Ç—å –∫–∞–∫–∞—è-–ª–∏–±–æ –ø–µ—Ä–µ–º–µ–Ω–Ω–∞—è, –∞ –º–æ–∂–µ—Ç –±—ã—Ç—å –∏ –±–∏—Ç —Å–æ—Å—Ç–æ—è–Ω–∏—è –Ω–æ–∂–∫–∏ –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–∞. –í—Å–µ –º–Ω–æ–≥–æ–±–∞–π—Ç–æ–≤—ã–µ –ø–æ–ª—è –∏ –¥–∞–Ω–Ω—ã–µ –ø–µ—Ä–µ–¥–∞—é—Ç—Å—è —Å—Ç–∞—Ä—à–∏–º –±–∞–π—Ç–æ–º –≤–ø–µ—Ä—ë–¥. Modbus –≤–∫–ª—é—á–∞–µ—Ç –≤ —Å–µ–±—è –º–Ω–æ–∂–µ—Å—Ç–≤–æ —Å—Ç–∞–Ω–¥–∞—Ä—Ç–Ω—ã—Ö —Ñ—É–Ω–∫—Ü–∏–π. –ü—Ä–∏—á—ë–º —Å—Ç–∞—Ä—à–∏–π –±–∏—Ç –≤ –Ω–æ–º–µ—Ä–µ —Ñ—É–Ω–∫—Ü–∏–∏ –≤ –æ—Ç–≤–µ—Ç–µ –≤–µ–¥–æ–º–æ–≥–æ —É–∫–∞–∑—ã–≤–∞–µ—Ç –Ω–∞ –Ω–∞–ª–∏—á–∏–µ –æ—à–∏–±–∫–∏, —Ç–∞–∫–∏–º –æ–±—Ä–∞–∑–æ–º –Ω–∞–º –¥–æ—Å—Ç—É–ø–Ω—ã –Ω–æ–º–µ—Ä–∞ —Ñ—É–Ω–∫—Ü–∏–π –æ—Ç 1 –¥–æ 127 (0 –Ω–µ —è–≤–ª—è–µ—Ç—Å—è –¥–æ–ø—É—Å—Ç–∏–º—ã–º –Ω–æ–º–µ—Ä–æ–º —Ñ—É–Ω–∫—Ü–∏–∏). –û—Å—Ç–∞–Ω–æ–≤–∏–º—Å—è –¥–ª—è –ø—Ä–∏–º–µ—Ä–∞ –Ω–∞ –Ω–µ—Å–∫–æ–ª—å–∫–∏—Ö –±–∞–∑–æ–≤—ã—Ö. –§—É–Ω–∫—Ü–∏–∏ Modbus –ß—Ç–µ–Ω–∏–µ —Ä–µ–≥–∏—Å—Ç—Ä–æ–≤ —Ñ–ª–∞–≥–æ–≤ (0x1) –ß–∏—Ç–∞–µ—Ç –±–∏—Ç–æ–≤–æ–µ(–í–ö–õ/–í–´–ö–õ) —Å–æ—Å—Ç–æ—è–Ω–∏–µ –¥–∏—Å–∫—Ä–µ—Ç–Ω—ã—Ö –≤—ã—Ö–æ–¥–æ–≤ (–æ–Ω–∏ –∂–µ —Ä–µ–≥–∏—Å—Ç—Ä—ã —Ñ–ª–∞–≥–æ–≤, coils). –ó–∞–ø—Ä–æ—Å –∫ –≤–µ–¥–æ–º–æ–º—É –æ–ø—Ä–µ–¥–µ–ª—è–µ—Ç –Ω–∞—á–∞–ª—å–Ω—ã–π –∞–¥—Ä–µ—Å —Ñ–ª–∞–≥–æ–≤—ã—Ö —Ä–µ–≥–∏—Å—Ç—Ä–æ–≤ (–Ω–æ–º–µ—Ä —Ü–∏—Ñ—Ä–æ–≤–æ–≥–æ –≤—ã—Ö–æ–¥–∞) –∏ –∫–æ–ª–∏—á–µ—Å—Ç–≤–æ –¥–ª—è —á—Ç–µ–Ω–∏—è.
–û—Ç–≤–µ—Ç –≤–µ–¥–æ–º–æ–≥–æ —Å–æ–¥–µ—Ä–∂–∏—Ç —Å–æ—Å—Ç–æ—è–Ω–∏—è —Ä–µ–≥–∏—Å—Ç—Ä–æ–≤ —Ñ–ª–∞–≥–æ–≤, –∑–∞–ø–∞–∫–æ–≤–∞–Ω–Ω—ã–µ –ø–æ–±–∏—Ç–æ–≤–æ –≤ –±–∞–π—Ç—ã –¥–∞–Ω–Ω—ã—Ö (1 - –í–ö–õ, 0 - –í–´–ö–õ), –≤ –∫–æ—Ç–æ—Ä—ã—Ö –º–ª–∞–¥—à–∏–π –±–∏—Ç —Å–∞–º–æ–≥–æ –ø–µ—Ä–≤–æ–≥–æ –±–∞–π—Ç–∞ —Å–æ–¥–µ—Ä–∂–∏—Ç —Å–æ—Å—Ç–æ—è–Ω–∏–µ —Ä–µ–≥–∏—Å—Ç—Ä–∞ –ø–æ –∑–∞–ø—Ä–∞—à–∏–≤–∞–µ–º–æ–º—É –∞–¥—Ä–µ—Å—É. –ù–µ –∏—Å–ø–æ–ª—å–∑—É–µ–º—ã–µ –±–∏—Ç—ã –≤ –ø–æ—Å–ª–µ–¥–Ω–µ–º –±–∞–π—Ç–µ –∑–∞–ø–æ–ª–Ω—è—é—Ç—Å—è –Ω—É–ª—è–º–∏. –ü–µ—Ä–µ–¥ –¥–∞–Ω–Ω—ã–º–∏ –ø–µ—Ä–µ–¥–∞—ë—Ç—Å—è –±–∞–π—Ç, —Å–æ–¥–µ—Ä–∂–∞—â–∏–π —á–∏—Å–ª–æ –ø–µ—Ä–µ–¥–∞–≤–∞–µ–º—ã—Ö –±–∞–π—Ç –¥–∞–Ω–Ω—ã—Ö —Å —Å–æ—Å—Ç–æ—è–Ω–∏—è–º–∏ —Ä–µ–≥–∏—Å—Ç—Ä–æ–≤ —Ñ–ª–∞–≥–æ–≤.
–í –¥–∞–Ω–Ω–æ–º –ø—Ä–∏–º–µ—Ä –±–∞–π—Ç –¥–∞–Ω–Ω—ã—Ö 0x03 (0b00000011) –æ–∑–Ω–∞—á–∞–µ—Ç, —á—Ç–æ –≤—Å–µ –¥–≤–∞ –∑–∞–ø—Ä–∞—à–∏–≤–∞–µ–º—ã—Ö —Ä–µ–≥–∏—Å—Ç—Ä–∞ —Ñ–ª–∞–≥–æ–≤ –≤–∫–ª—é—á–µ–Ω—ã. –ß—Ç–µ–Ω–∏–µ —Ü–∏—Ñ—Ä–æ–≤—ã—Ö –≤—Ö–æ–¥–æ–≤ (0x2) –§–æ—Ä–º–∞—Ç PDU –ø–æ–ª–Ω–æ—Å—Ç—å—é –∞–Ω–∞–ª–æ–≥–∏—á–µ–Ω —á—Ç–µ–Ω–∏—é —Ä–µ–≥–∏—Å—Ç—Ä–æ–≤ —Ñ–ª–∞–≥–æ–≤. –ß—Ç–µ–Ω–∏–µ —Ä–µ–≥–∏—Å—Ç—Ä–æ–≤ —Ö—Ä–∞–Ω–µ–Ω–∏—è (0x3) –ß–∏—Ç–∞–µ—Ç –¥–≤—É—Ö–±–∞–π—Ç–æ–≤—ã–µ –∑–Ω–∞—á–µ–Ω–∏—è —Ä–µ–≥–∏—Å—Ç—Ä–æ–≤ —Ö—Ä–∞–Ω–µ–Ω–∏—è. –ó–∞–ø—Ä–æ—Å –∫ –≤–µ–¥–æ–º–æ–º—É –æ–ø—Ä–µ–¥–µ–ª—è–µ—Ç –Ω–∞—á–∞–ª—å–Ω—ã–π –∞–¥—Ä–µ—Å —Ä–µ–≥–∏—Å—Ç—Ä–æ–≤ —Ö—Ä–∞–Ω–µ–Ω–∏—è –∏ –∫–æ–ª–∏—á–µ—Å—Ç–≤–æ —Ä–µ–≥–∏—Å—Ç—Ä–æ–≤ –¥–ª—è —á—Ç–µ–Ω–∏—è.
–û—Ç–≤–µ—Ç –≤–µ–¥–æ–º–æ–≥–æ —Å–æ–¥–µ—Ä–∂–∏—Ç –¥–≤—É—Ö–±–∞–π—Ç–æ–≤—ã–µ –∑–Ω–∞—á–µ–Ω–∏—è —Ä–µ–≥–∏—Å—Ç—Ä–æ–≤ —Ö—Ä–∞–Ω–µ–Ω–∏—è (—Å—Ç–∞—Ä—à–∏–º –±–∞–π—Ç–æ–º –≤–ø–µ—Ä—ë–¥) –ø–æ –Ω–∞—á–∞–ª—å–Ω–æ–º—É –∞–¥—Ä–µ—Å—É –≤ –∑–∞–ø—Ä–æ—Å–µ –∏ –±–∞–π—Ç —Å –∫–æ–ª–∏—á–µ—Å—Ç–≤–æ–º –ø–µ—Ä–µ–¥–∞–≤–∞–µ–º—ã—Ö –±–∞–π—Ç –¥–∞–Ω–Ω—ã—Ö —Å–æ –∑–Ω–∞—á–µ–Ω–∏—è–º–∏ —Ä–µ–≥–∏—Å—Ç—Ä–æ–≤ —Ö—Ä–∞–Ω–µ–Ω–∏—è.
–í –¥–∞–Ω–Ω–æ–º –ø—Ä–∏–º–µ—Ä–µ –ø–µ—Ä–µ–¥–∞–≤–∞–µ–º—ã–µ –¥–∞–Ω–Ω—ã–µ –æ–∑–Ω–∞—á–∞—é—Ç, —á—Ç–æ –ø–æ –Ω–∞—á–∞–ª—å–Ω–æ–º—É –∞–¥—Ä–µ—Å—É –≤ –∑–∞–ø—Ä–æ—Å–µ, –¥–≤–∞ –ø–æ—Å–ª–µ–¥–æ–≤–∞—Ç–µ–ª—å–Ω–æ –∏–¥—É—â–∏—Ö —Ä–µ–≥–∏—Å—Ç—Ä–∞ —Ö—Ä–∞–Ω–µ–Ω–∏—è –∏–º–µ—é—Ç –∑–Ω–∞—á–µ–Ω–∏—è 0x1234 –∏ 0x5678. –ß—Ç–µ–Ω–∏–µ —Ä–µ–≥–∏—Å—Ç—Ä–æ–≤ –≤–≤–æ–¥–∞ (0x4) –§–æ—Ä–º–∞—Ç PDU –ø–æ–ª–Ω–æ—Å—Ç—å—é –∞–Ω–∞–ª–æ–≥–∏—á–µ–Ω —á—Ç–µ–Ω–∏—é —Ä–µ–≥–∏—Å—Ç—Ä–æ–≤ —Ö—Ä–∞–Ω–µ–Ω–∏—è. –£—Å—Ç–∞–Ω–æ–≤–∫–∞ –æ–¥–Ω–æ–≥–æ —Ä–µ–≥–∏—Å—Ç—Ä–∞ —Ñ–ª–∞–≥–æ–≤ (0x5) –£—Å—Ç–∞–Ω–∞–≤–ª–∏–≤–∞–µ—Ç –±–∏—Ç–æ–≤–æ–µ (–í–ö–õ/–í–´–ö–õ) –∑–Ω–∞—á–µ–Ω–∏–µ —Ä–µ–≥–∏—Å—Ç—Ä–∞ —Ñ–ª–∞–≥–æ–≤. –ó–∞–ø—Ä–æ—Å –∫ –≤–µ–¥–æ–º–æ–º—É –æ–ø—Ä–µ–¥–µ–ª—è–µ—Ç –∞–¥—Ä–µ—Å —Ä–µ–≥–∏—Å—Ç—Ä–∞ —Ñ–ª–∞–≥–æ–≤ –∏ –µ–≥–æ –∑–Ω–∞—á–µ–Ω–∏–µ. –ü–æ—Å–ª–µ–¥–Ω–µ–µ –ø–µ—Ä–µ–¥–∞—ë—Ç—Å—è –≤ –¥–≤—É—Ö –±–∞–π—Ç–∞—Ö, –ø—Ä–∏—á—ë–º –í–ö–õ —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É–µ—Ç –∑–Ω–∞—á–µ–Ω–∏–µ 0xff00, –∞ –í–´–ö–õ - 0x0000.
–û—Ç–≤–µ—Ç –≤–µ–¥–æ–º–æ–≥–æ –ø–æ–≤—Ç–æ—Ä—è–µ—Ç –∑–∞–ø—Ä–æ—Å.
–í –¥–∞–Ω–Ω–æ–º –ø—Ä–∏–º–µ—Ä–µ –æ—Å—É—â–µ—Å—Ç–≤–ª—è–µ—Ç—Å—è –∑–∞–ø–∏—Å—å –≤ —Ä–µ–≥–∏—Å—Ç—Ä —Ñ–ª–∞–≥–æ–≤ –ø–æ –∞–¥—Ä–µ—Å—É 0x50 –∑–Ω–∞—á–µ–Ω–∏—è 0x1 (–í–ö–õ). –£—Å—Ç–∞–Ω–æ–≤–∫–∞ –æ–¥–Ω–æ–≥–æ —Ä–µ–≥–∏—Å—Ç—Ä–∞ —Ö—Ä–∞–Ω–µ–Ω–∏—è (0x6) –£—Å—Ç–∞–Ω–∞–≤–ª–∏–≤–∞–µ—Ç –¥–≤—É—Ö–±–∞–π—Ç–æ–≤–æ–µ –∑–Ω–∞—á–µ–Ω–∏–µ —Ä–µ–≥–∏—Å—Ç—Ä–∞ —Ö—Ä–∞–Ω–µ–Ω–∏—è. –ó–∞–ø—Ä–æ—Å –∫ –≤–µ–¥–æ–º–æ–º—É –æ–ø—Ä–µ–¥–µ–ª—è–µ—Ç –∞–¥—Ä–µ—Å —Ä–µ–≥–∏—Å—Ç—Ä–∞ —Ñ–ª–∞–≥–æ–≤ –∏ –µ–≥–æ –∑–Ω–∞—á–µ–Ω–∏–µ.
–û—Ç–≤–µ—Ç –≤–µ–¥–æ–º–æ–≥–æ –ø–æ–≤—Ç–æ—Ä—è–µ—Ç –∑–∞–ø—Ä–æ—Å.
–í –¥–∞–Ω–Ω–æ–º –ø—Ä–∏–º–µ—Ä–µ –æ—Å—É—â–µ—Å—Ç–≤–ª—è–µ—Ç—Å—è –∑–∞–ø–∏—Å—å –≤ —Ä–µ–≥–∏—Å—Ç—Ä —Ö—Ä–∞–Ω–µ–Ω–∏—è –ø–æ –∞–¥—Ä–µ—Å—É 0x60 –∑–Ω–∞—á–µ–Ω–∏—è 0x1234. –£—Å—Ç–∞–Ω–æ–≤–∫–∞ –Ω–µ—Å–∫–æ–ª—å–∫–∏—Ö —Ä–µ–≥–∏—Å—Ç—Ä–æ–≤ —Ñ–ª–∞–≥–æ–≤ (0xf) –£—Å—Ç–∞–Ω–∞–≤–ª–∏–≤–∞–µ—Ç –±–∏—Ç–æ–≤—ã–µ (–í–ö–õ/–í–´–ö–õ) –∑–Ω–∞—á–µ–Ω–∏—è —Ä–µ–≥–∏—Å—Ç—Ä–æ–≤ —Ñ–ª–∞–≥–æ–≤. –ó–∞–ø—Ä–æ—Å –∫ –≤–µ–¥–æ–º–æ–º—É —Å–æ–¥–µ—Ä–∂–∏—Ç –Ω–∞—á–∞–ª—å–Ω—ã–π –∞–¥—Ä–µ—Å —Ä–µ–≥–∏—Å—Ç—Ä–æ–≤ —Ñ–ª–∞–≥–æ–≤ –∏ –∫–æ–ª–∏—á–µ—Å—Ç–≤–æ –¥–ª—è –∑–∞–ø–∏—Å–∏. –ó–Ω–∞—á–µ–Ω–∏—è —Ä–µ–≥–∏—Å—Ç—Ä–æ–≤ —Ñ–ª–∞–≥–æ–≤ —É–ø–∞–∫–æ–≤—ã–≤–∞—é—Ç—Å—è –ø–æ–±–∏—Ç–æ–≤–æ (1 - –í–ö–õ, 0 - –í–´–ö–õ) –≤ –±–∞–π—Ç—ã –¥–∞–Ω–Ω—ã—Ö, –≤ –∫–æ—Ç–æ—Ä—ã—Ö –º–ª–∞–¥—à–∏–π –±–∏—Ç —Å–∞–º–æ–≥–æ –ø–µ—Ä–≤–æ–≥–æ –±–∞–π—Ç–∞ —Å–æ–¥–µ—Ä–∂–∏—Ç –∑–Ω–∞—á–µ–Ω–∏–µ —Ä–µ–≥–∏—Å—Ç—Ä–∞ –ø–æ –∑–∞–¥–∞–Ω–Ω–æ–º—É –∞–¥—Ä–µ—Å—É. –ù–µ –∏—Å–ø–æ–ª—å–∑—É–µ–º—ã–µ –±–∏—Ç—ã –≤ –ø–æ—Å–ª–µ–¥–Ω–µ–º –±–∞–π—Ç–µ –∑–∞–ø–æ–ª–Ω—è—é—Ç—Å—è –Ω—É–ª—è–º–∏. –ü–µ—Ä–µ–¥ –¥–∞–Ω–Ω—ã–º–∏ –ø–µ—Ä–µ–¥–∞—ë—Ç—Å—è –±–∞–π—Ç, —Å–æ–¥–µ—Ä–∂–∞—â–∏–π —á–∏—Å–ª–æ –ø–µ—Ä–µ–¥–∞–≤–∞–µ–º—ã—Ö –±–∞–π—Ç –¥–∞–Ω–Ω—ã—Ö —Å–æ –∑–Ω–∞—á–µ–Ω–∏—è–º–∏ —Ä–µ–≥–∏—Å—Ç—Ä–æ–≤ —Ñ–ª–∞–≥–æ–≤.
–û—Ç–≤–µ—Ç –æ—Ç –≤–µ–¥–æ–º–æ–≥–æ —Å–æ–¥–µ—Ä–∂–∏—Ç –Ω–∞—á–∞–ª—å–Ω—ã–π –∞–¥—Ä–µ—Å —Ä–µ–≥–∏—Å—Ç—Ä–æ–≤ —Ñ–ª–∞–≥–æ–≤ –∏ –∫–æ–ª–∏—á–µ—Å—Ç–≤–æ —É—Å—Ç–∞–Ω–æ–≤–ª–µ–Ω–Ω—ã—Ö –∑–Ω–∞—á–µ–Ω–∏–π.
–í –¥–∞–Ω–Ω–æ–º –ø—Ä–∏–º–µ—Ä —É—Å—Ç–∞–Ω–∞–≤–ª–∏–≤–∞—é—Ç—Å—è –∑–Ω–∞—á–µ–Ω–∏—è –¥–≤—É—Ö —Ä–µ–≥–∏—Å—Ç—Ä–æ–≤ —Ñ–ª–∞–≥–æ–≤ –ø–æ –Ω–∞—á–∞–ª—å–Ω–æ–º—É –∞–¥—Ä–µ—Å—É 0x00f0 –∫–∞–∫ –í–ö–õ –∏ –í–ö–õ. –£—Å—Ç–∞–Ω–æ–≤–∫–∞ –Ω–µ—Å–∫–æ–ª—å–∫–∏—Ö —Ä–µ–≥–∏—Å—Ç—Ä–æ–≤ —Ö—Ä–∞–Ω–µ–Ω–∏—è (0x10) –£—Å—Ç–∞–Ω–∞–≤–ª–∏–≤–∞–µ—Ç –∑–Ω–∞—á–µ–Ω–∏—è –Ω–µ—Å–∫–æ–ª—å–∫–∏—Ö —Ä–µ–≥–∏—Å—Ç—Ä–æ–≤ —Ö—Ä–∞–Ω–µ–Ω–∏—è. –ó–∞–ø—Ä–æ—Å –∫ –≤–µ–¥–æ–º–æ–º—É —Å–æ–¥–µ—Ä–∂–∏—Ç –Ω–∞—á–∞–ª—å–Ω—ã–π –∞–¥—Ä–µ—Å —Ä–µ–≥–∏—Å—Ç—Ä–æ–≤ —Ö—Ä–∞–Ω–µ–Ω–∏—è, –∫–æ–ª–∏—á–µ—Å—Ç–≤–æ —Ä–µ–≥–∏—Å—Ç—Ä–æ–≤ –¥–ª—è –∑–∞–ø–∏—Å–∏, —á–∏—Å–ª–æ –±–∞–π—Ç –ø–µ—Ä–µ–¥–∞–≤–∞–µ–º—ã—Ö –¥–∞–Ω–Ω—ã—Ö –∑–Ω–∞—á–µ–Ω–∏–π –∏ –¥–≤—É—Ö–±–∞–π—Ç–æ–≤—ã–µ –∑–Ω–∞—á–µ–Ω–∏—è —Ä–µ–≥–∏—Å—Ç—Ä–æ–≤ —Ö—Ä–∞–Ω–µ–Ω–∏—è.
–û—Ç–≤–µ—Ç –æ—Ç –≤–µ–¥–æ–º–æ–≥–æ —Å–æ–¥–µ—Ä–∂–∏—Ç –Ω–∞—á–∞–ª—å–Ω—ã–π –∞–¥—Ä–µ—Å —Ä–µ–≥–∏—Å—Ç—Ä–æ–≤ —Ö—Ä–∞–Ω–µ–Ω–∏—è –∏ –∫–æ–ª–∏—á–µ—Å—Ç–≤–æ —É—Å—Ç–∞–Ω–æ–≤–ª–µ–Ω–Ω—ã—Ö –∑–Ω–∞—á–µ–Ω–∏–π.
–í –¥–∞–Ω–Ω–æ–º –ø—Ä–∏–º–µ—Ä —É—Å—Ç–∞–Ω–∞–≤–ª–∏–≤–∞—é—Ç—Å—è –∑–Ω–∞—á–µ–Ω–∏—è –¥–≤—É—Ö —Ä–µ–≥–∏—Å—Ç—Ä–æ–≤ —Ö—Ä–∞–Ω–µ–Ω–∏—è –ø–æ –Ω–∞—á–∞–ª—å–Ω–æ–º—É –∞–¥—Ä–µ—Å—É 0x1000 –∫–∞–∫ 0x1234 –∏ 0x5678. –ü–æ–ª—É—á–µ–Ω–∏–µ –∏–¥–µ–Ω—Ç–∏—Ñ–∏–∫–∞—Ç–æ—Ä–∞ –≤–µ–¥–æ–º–æ–≥–æ —É—Å—Ç—Ä–æ–π—Å—Ç–≤–∞ (0x11) –ü–æ–ª—É—á–∞–µ—Ç –∏–Ω—Ñ–æ—Ä–º–∞—Ü–∏—é –æ –≤–µ–¥–æ–º–æ–º —É—Å—Ç—Ä–æ–π—Å—Ç–≤–µ: –∏–¥–µ–Ω—Ç–∏—Ñ–∏–∫–∞—Ç–æ—Ä, —Å–æ—Å—Ç–æ—è–Ω–∏–µ –∏ —Å–ø–µ—Ü–∏—Ñ–∏—á–Ω—ã–µ –¥–ª—è –∫–æ–Ω–∫—Ä–µ—Ç–Ω–æ–≥–æ —Ç–∏–ø–∞ —É—Å—Ç—Ä–æ–π—Å—Ç–≤–∞ –¥–∞–Ω–Ω—ã–µ. –ó–∞–ø—Ä–æ—Å –∫ –≤–µ–¥–æ–º–æ–º—É —Å–æ–¥–µ—Ä–∂–∏—Ç –ª–∏—à—å –Ω–æ–º–µ—Ä —Ñ—É–Ω–∫—Ü–∏–∏.
–û—Ç–≤–µ—Ç –æ—Ç –≤–µ–¥–æ–º–æ–≥–æ —Å–æ–¥–µ—Ä–∂–∏—Ç –∫–æ–ª–∏—á–µ—Å—Ç–≤–æ –ø–µ—Ä–µ–¥–∞–≤–∞–µ–º—ã—Ö —Å–ª–µ–¥–æ–º –±–∞–π—Ç –¥–∞–Ω–Ω—ã—Ö, –∏–¥–µ–Ω—Ç–∏—Ñ–∏–∫–∞—Ç–æ—Ä –≤–µ–¥–æ–º–æ–≥–æ —É—Å—Ç—Ä–æ–π—Å—Ç–≤–∞, —Å–æ—Å—Ç–æ—è–Ω–∏–µ –≤–µ–¥–æ–º–æ–≥–æ —É—Å—Ç—Ä–æ–π—Å—Ç–≤–∞ (0x00 - –í–´–ö–õ, 0xFF - –í–ö–õ) –∏ –¥–∞–Ω–Ω—ã–µ, –∑–∞–≤–∏—Å—è—â–∏–µ –æ—Ç –∫–æ–Ω–∫—Ä–µ—Ç–Ω–æ–≥–æ —Ç–∏–ø–∞ —É—Å—Ç—Ä–æ–π—Å—Ç–≤–∞.
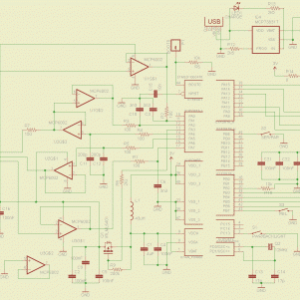
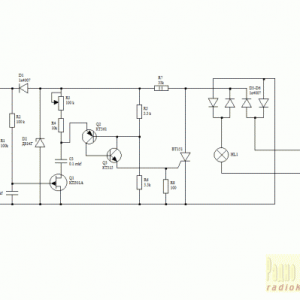
–í –¥–∞–Ω–Ω–æ–º –ø—Ä–∏–º–µ—Ä–µ –ø–æ–ª—É—á–µ–Ω –∏–¥–µ–Ω—Ç–∏—Ñ–∏–∫–∞—Ç–æ—Ä –≤–µ–¥–æ–º–æ–≥–æ (0x55), —Å–æ—Å—Ç–æ—è–Ω–∏–µ (–í–ö–õ - 0xff) –∏ –¥–æ–ø–æ–ª–Ω–∏—Ç–µ–ª—å–Ω—ã–µ –¥–∞–Ω–Ω—ã–µ (0x01, 0x02, 0x03). –Ý–µ–∞–ª–∏–∑–∞—Ü–∏—è –¥–ª—è –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–∞ USART –ü–µ—Ä–≤–æ–µ —á—Ç–æ –Ω—É–∂–Ω–æ - —ç—Ç–æ —Å–∞–º USART - –∏–º–µ–Ω–Ω–æ –æ–Ω –±—É–¥–µ—Ç –ø–æ–ª—É—á–∞—Ç—å –∏ –ø–µ—Ä–µ–¥–∞–≤–∞—Ç—å –ø–∞–∫–µ—Ç—ã –≤ –ª–∏–Ω–∏—é. –û–±—è–∑–∞—Ç–µ–ª—å–Ω–æ –¥–æ–ª–∂–µ–Ω –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å DMA - –∑–∞—á–µ–º –Ω–∞–º —Å–∞–º–∏–º –ø–µ—Ä–µ–¥–∞–≤–∞—Ç—å –±–∞–π—Ç—ã, –µ—Å–ª–∏ —ç—Ç–æ –º–æ–∂–µ—Ç —Å–¥–µ–ª–∞—Ç—å –∫—Ç–æ-—Ç–æ –¥—Ä—É–≥–æ–π? –ü–∞–∫–µ—Ç—ã Modbus RTU —Ä–∞–∑–¥–µ–ª—è—é—Ç—Å—è –ø–∞—É–∑–∞–º–∏ - –º–æ–∂–Ω–æ, –∫–æ–Ω–µ—á–Ω–æ, –ø–æ–º—É–¥—Ä–∏—Ç—å —Å —Ç–∞–π–º–µ—Ä–æ–º, –Ω–æ –ø–µ—Ä–∏—Ñ–µ—Ä–∏—è USART —É–º–µ–µ—Ç –¥–µ—Ç–µ–∫—Ç–∏—Ä–æ–≤–∞—Ç—å —Å–≤–æ–±–æ–¥–Ω—É—é –ª–∏–Ω–∏—é, —Ç–∞–∫ —á—Ç–æ –ø—Ä–æ—Å—Ç–æ –ø—Ä–µ–¥–æ—Å—Ç–∞–≤–∏–º –∏ —ç—Ç–æ –ø–µ—Ä–∏—Ñ–µ—Ä–∏–∏, –±–ª–∞–≥–æ —ç—Ç–æ –ø—Ä–µ–∫—Ä–∞—Å–Ω–æ —Ä–∞–±–æ—Ç–∞–µ—Ç, –ø—Ä–∏—è—Ç–Ω–æ –∫–æ–≥–¥–∞ –∞–ø–ø–∞—Ä–∞—Ç—É—Ä–∞ –¥–µ–ª–∞–µ—Ç —Ä–∞–±–æ—Ç—É –∑–∞ –Ω–∞—Å. –•–æ—Ç—è Modbus RTU –æ–±–µ—Å–ø–µ—á–∏–≤–∞–µ—Ç –ø—Ä–æ–≤–µ—Ä–∫—É —Ü–µ–ª–æ—Å—Ç–Ω–æ—Å—Ç–∏ –ø–∞–∫–µ—Ç–∞ –ø–æ—Å—Ä–µ–¥—Å—Ç–≤–æ–º CRC, –Ω–µ–ø–ª–æ—Ö–æ –±—ã –æ–±–Ω–∞—Ä—É–∂–∏–≤–∞—Ç—å –æ—à–∏–±–∫–∏ –ø—Ä–∏—ë–º–∞ USART, –Ω–µ –Ω—É–∂–Ω–æ –¥–µ–ª–∞—Ç—å –ª–∏—à–Ω—é—é —Ä–∞–±–æ—Ç—É –ø–æ –ø—Ä–∏—ë–º—É –∏ –æ–±—Ä–∞–±–æ—Ç–∫–µ –∑–∞–≤–µ–¥–æ–º–æ –Ω–µ–ø—Ä–∞–≤–∏–ª—å–Ω—ã—Ö –¥–∞–Ω–Ω—ã—Ö. –ï—â—ë –æ–¥–Ω–æ–π –ø—Ä–∏—è—Ç–Ω–æ–π –æ—Å–æ–±–µ–Ω–Ω–æ—Å—Ç—å—é USART –≤ stm32 —è–≤–ª—è–µ—Ç—Å—è –≤–æ–∑–º–æ–∂–Ω–æ—Å—Ç—å –Ω–∏—á–µ–≥–æ –Ω–µ –ø—Ä–∏–Ω–∏–º–∞—Ç—å (—Å–ø–∞—Ç—å) –¥–æ –¥–µ—Ç–µ–∫—Ç–∏—Ä–æ–≤–∞–Ω–∏—è —Å–≤–æ–±–æ–¥–Ω–æ–π –ª–∏–Ω–∏–∏, —á—Ç–æ –º–æ–∂–Ω–æ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å –¥–ª—è –ø—Ä–æ–ø—É—Å–∫–∞ —Å–æ–æ–±—â–µ–Ω–∏–π, –∞–¥—Ä–µ—Å–æ–≤–∞–Ω–Ω—ã—Ö –Ω–µ –Ω–∞—à–µ–º—É —É—Å—Ç—Ä–æ–π—Å—Ç–≤—É. Modbus RTU –ö —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏ Modbus RTU –µ—Å—Ç—å –æ–¥–Ω–∞, –Ω–æ –≤–∞–∂–Ω–∞—è —Ö–æ—Ç–µ–ª–∫–∞ - —É–¥–æ–±—Å—Ç–≤–æ - –∫–∞–∫ –º–æ–∂–Ω–æ –º–µ–Ω—å—à–µ —Ç–µ–ª–æ–¥–≤–∏–∂–µ–Ω–∏–π –¥–ª—è –æ–±—Ä–∞–±–æ—Ç–∫–∏ –æ–±—Ä–∞—â–µ–Ω–∏–π –∫ –Ω–∞—à–µ–º—É —É—Å—Ç—Ä–æ–π—Å—Ç–≤—É –∏ –º–∏–Ω–∏–º—É–º –∑–∞—Ç—Ä–∞—Ç –¥–ª—è –¥–æ–±–∞–≤–ª–µ–Ω–∏—è –æ—á–µ—Ä–µ–¥–Ω–æ–≥–æ —ç–ª–µ–º–µ–Ω—Ç–∞ –¥–∞–Ω–Ω—ã—Ö. –°—Ö–µ–º–∞ –°—Ö–µ–º–∞ —Ç—Ä–∏–≤–∏–∞–ª—å–Ω–∞, –ø–æ —Å—É—Ç–∏, –∏–º–µ—è –æ—Ç–ª–∞–¥–æ—á–Ω—É—é –ø–ª–∞—Ç—É, –¥–æ—Å—Ç–∞—Ç–æ—á–Ω–æ —Å–æ–µ–¥–∏–Ω–∏—Ç—å –∫—Ä–µ—Å—Ç-–Ω–∞–∫—Ä–µ—Å—Ç Tx –∏ Rx —Å Rx –∏ Tx –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞—Ç–µ–ª—è USB –∏–ª–∏ RS-323 –∫–æ–º–ø—å—é—Ç–µ—Ä–∞ –≤ UART —Å –ø–∏–Ω–∞–º–∏ –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–∞. –°–≤–µ—Ç–æ–¥–∏–æ–¥ –ø–æ–¥–∫–ª—é—á–µ–Ω –¥–ª—è —É–ø—Ä–∞–≤–ª–µ–Ω–∏—è –∏–º –ø–æ Modbus, –Ω–∞ –º–æ–µ–π –æ—Ç–ª–∞–¥–æ—á–Ω–æ–π –ø–ª–∞—Ç–µ –æ–Ω –≤–∏—Å–∏—Ç –Ω–∞ –Ω–æ–∂–∫–µ 1 –ø–æ—Ä—Ç–∞ A. –ü—Ä–æ—à–∏–≤–∫–∞ –ü—Ä–æ–≥—Ä–∞–º–º–∞ "–ü—Ä–∏–≤–µ—Ç, –ú–∏—Ä!" –¥–ª—è –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–∞ - —ç—Ç–æ –º–æ—Ä–≥–∞–Ω–∏–µ —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. –ü–æ—ç—Ç–æ–º—É —Å–¥–µ–ª–∞–µ–º —Ç–∞–∫, —á—Ç–æ–±—ã —ç—Ç–∏–º —Å–∞–º—ã–º —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º –º–æ–∂–Ω–æ –±—ã–ª–æ —É–ø—Ä–∞–≤–ª—è—Ç—å —Å –ü–ö –ø–æ Modbus, –∑–∞–¥–∞–≤–∞—è –∑–Ω–∞—á–µ–Ω–∏–µ —Ä–µ–≥–∏—Å—Ç—Ä–∞ —Ñ–ª–∞–≥–æ–≤, –∑–∞–æ–¥–Ω–æ —Å–¥–µ–ª–∞–µ–º, —Å–∫–∞–∂–µ–º, —Å—á—ë—Ç—á–∏–∫, –∑–Ω–∞—á–µ–Ω–∏–µ –∫–æ—Ç–æ—Ä–æ–≥–æ –±—É–¥–µ–º –ø–æ–ª—É—á–∞—Ç—å –∏ –∑–∞–¥–∞–≤–∞—Ç—å –∫–∞–∫ —Ä–µ–≥–∏—Å—Ç—Ä —Ö—Ä–∞–Ω–µ–Ω–∏—è. –û–±—ä—è–≤–∏–º –Ω–µ–æ–±—Ö–æ–¥–∏–º—ã–µ –ø–µ—Ä–µ–º–µ–Ω–Ω—ã–µ. /** //! –®–∏–Ω–∞ USART.
–û–ø–∏—à–µ–º —Ñ—É–Ω–∫—Ü–∏–∏ –¥–ª—è —Ä–∞–±–æ—Ç—ã —Å USART. /**
–¢–µ–ø–µ—Ä—å –æ—á–µ—Ä–µ–¥—å —Ñ—É–Ω–∫—Ü–∏–æ–Ω–∞–ª–∞, –æ—Ç–≤–µ—á–∞—é—â–µ–≥–æ –∑–∞ —Ä–∞–±–æ—Ç—É Modbus. /**
–í–æ—Ç –∏ –≤—Å—è –ø—Ä–æ—à–∏–≤–∫–∞ (–æ–ø—É—â–µ–Ω–∞ —Ä–µ–∞–ª–∏–∑–∞—Ü–∏—è –±–∏–±–ª–∏–æ—Ç–µ–∫ USART –∏ Modbus RTU - —Å—Å—ã–ª–∫–∏ –Ω–∞ –Ω–∏—Ö –≤ –∫–æ–Ω—Ü–µ —Å—Ç–∞—Ç—å–∏, –∫ —Ç–æ–º—É –∂–µ –ø–æ—Å–ª–µ–¥–Ω—è—è –¥–æ–≤–æ–ª—å–Ω–æ –≥—Ä–æ–º–æ–∑–¥–∫–∞), —Ç–µ–ø–µ—Ä—å –Ω–∞—à–µ —É—Å—Ç—Ä–æ–π—Å—Ç–≤–æ –±—É–¥–µ—Ç —Ä–µ–∞–≥–∏—Ä–æ–≤–∞—Ç—å –Ω–∞ –∑–∞–ø—Ä–æ—Å—ã Modbus –Ω–∞ –∏–Ω—Ç–µ—Ä—Ñ–µ–π—Å–µ USART1. –°–∞–º–æ–µ –∑–∞–º–µ—á–∞—Ç–µ–ª—å–Ω–æ–µ –∏ —É–¥–æ–±–Ω–æ–µ, –Ω–∞ –º–æ–π –≤–∑–≥–ª—è–¥, —ç—Ç–æ —Ç–µ —Å–∞–º—ã–µ —Ñ—É–Ω–∫—Ü–∏–∏ –æ–±—Ä–∞—Ç–Ω–æ–≥–æ –≤—ã–∑–æ–≤–∞ (–∫–∞–ª–ª–±—ç–∫–∏) –¥–æ—Å—Ç—É–ø–∞ –∫ –¥–∞–Ω–Ω—ã–º - –Ω–µ –Ω—É–∂–Ω–æ –∑–∞–±–æ—Ç–∏—Ç—å—Å—è –æ–± –æ–±—Ä–∞–±–æ—Ç–∫–µ –∑–∞–ø—Ä–æ—Å–∞ –∏ –ø—Ä–∞–≤–∏–ª—å–Ω–æ–º –∑–∞–ø–æ–ª–Ω–µ–Ω–∏–∏ –æ—Ç–≤–µ—Ç–∞, –≤—Å—ë —ç—Ç–æ –∑–∞ –Ω–∞—Å —Å–¥–µ–ª–∞–µ—Ç –±–∏–±–ª–∏–æ—Ç–µ–∫–∞, –≤—Å—ë —á—Ç–æ –Ω–∞–º –Ω—É–∂–Ω–æ - —É–∫–∞–∑–∞—Ç—å –∫–∞–∫—É—é —Ñ—É–Ω–∫—Ü–∏—é –≤—ã–∑—ã–≤–∞—Ç—å –¥–ª—è –∫–∞–∫–æ–≥–æ —Ç–∏–ø–∞ –¥–∞–Ω–Ω—ã—Ö! –Ý–∞–∑–º–µ—Ä –ø—Ä–æ—à–∏–≤–∫–∏ —Å–æ—Å—Ç–∞–≤–ª—è–µ—Ç –≤—Å–µ–≥–æ 6.5 –∫–± (6634 –±–∞–π—Ç–∞). –Ý–µ–∞–ª–∏–∑–∞—Ü–∏—è –¥–ª—è –∫–æ–º–ø—å—é—Ç–µ—Ä–∞ –î–ª—è –∫–æ–º–ø—å—é—Ç–µ—Ä–∞ –≤–æ—Å–ø–æ–ª—å–∑—É–µ–º—Å—è –¥–æ–≤–æ–ª—å–Ω–æ —É–¥–æ–±–Ω–æ–π –±–∏–±–ª–∏–æ—Ç–µ–∫–æ–π libmodbus. –ü—Ä–æ–≥—Ä–∞–º–º–∞ –¢—É—Ç –≤—Å—ë –æ—á–µ–Ω—å –ø—Ä–æ—Å—Ç–æ, –±–∏–±–ª–∏–æ—Ç–µ–∫–∞ –∏–º–µ–µ—Ç –¥–æ–≤–æ–ª—å–Ω–æ –ø—Ä–æ—Å—Ç–æ–π –∏ —É–¥–æ–±–Ω—ã–π –∏–Ω—Ç–µ—Ä—Ñ–µ–π—Å. –ü–µ—Ä–µ–º–µ–Ω–Ω—ã–µ. // –ö–æ–Ω—Ç–µ–∫—Å—Ç Modbus. –ò –æ–±—Ä–∞—â–µ–Ω–∏–µ –∫ —É—Å—Ç—Ä–æ–π—Å—Ç–≤—É (–æ–ø—É—Å—Ç–∏–º –æ–±—Ä–∞–±–æ—Ç–∫—É –æ—à–∏–±–æ–∫). // –°–æ–∑–¥–∞–¥–∏–º –∫–æ–Ω—Ç–µ–∫—Å—Ç Modbus –∏ –æ—Ç–∫—Ä–æ–µ–º –ø–æ—Ä—Ç —Å –∑–∞–¥–∞–Ω–Ω—ã–º–∏ –ø–∞—Ä–∞–º–µ—Ç—Ä–∞–º–∏. // –Ý–µ–∂–∏–º - RS-232. // –°–æ–µ–¥–∏–Ω–∏–º—Å—è. // –°–æ—Å—Ç–æ—è–Ω–∏–µ —Å–≤–µ—Ç–æ–¥–∏–æ–¥–∞. // –í—ã–≤–µ–¥–µ–º –Ω–∞ —ç–∫—Ä–∞–Ω. // –ò–Ω–≤–µ—Ä—Ç–∏—Ä—É–µ–º. // –ó–∞–ø–∏—à–µ–º –∑–Ω–∞—á–µ–Ω–∏–µ —Ä–µ–≥–∏—Å—Ç—Ä–∞ —Ñ–ª–∞–≥–æ–≤.
// –ó–Ω–∞—á–µ–Ω–∏–µ —Å—á—ë—Ç—á–∏–∫–∞. // –ü–æ–ª—É—á–∏–º –∑–Ω–∞—á–µ–Ω–∏–µ —Ä–µ–≥–∏—Å—Ç—Ä–∞ —Ö—Ä–∞–Ω–µ–Ω–∏—è. // –í—ã–≤–µ–¥–µ–º –Ω–∞ —ç–∫—Ä–∞–Ω. // –û–±–Ω—É–ª–∏–º –∑–Ω–∞—á–µ–Ω–∏–µ —Ä–µ–≥–∏—Å—Ç—Ä–∞ —Ö—Ä–∞–Ω–µ–Ω–∏—è.
// –ë—É—Ñ–µ—Ä –¥–ª—è –∏–¥–µ–Ω—Ç–∏—Ñ–∏–∫–∞—Ç–æ—Ä–∞ —É—Å—Ç—Ä–æ–π—Å—Ç–≤–∞. // –ù—É–ª–µ–≤–æ–π –±–∞–π—Ç –≤ –æ—Ç–≤–µ—Ç–µ - –∏–¥–µ–Ω—Ç–∏—Ñ–∏–∫–∞—Ç–æ—Ä. // –í—ã–≤–µ–¥–µ–º –ø–æ–ª—É—á–µ–Ω–Ω—ã–µ —Å–≤–µ–¥–µ–Ω–∏—è –Ω–∞ —ç–∫—Ä–∞–Ω. –í—Å—ë, —Ç–µ–ø–µ—Ä—å –ø—Ä–∏ –∑–∞–ø—É—Å–∫–µ –ø—Ä–æ–≥—Ä–∞–º–º—ã, –Ω–∞ —É—Å—Ç—Ä–æ–π—Å—Ç–≤–µ —Å–≤–µ—Ç–æ–¥–∏–æ–¥ –±—É–¥–µ—Ç –º–µ–Ω—è—Ç—å —Å–≤–æ—ë —Å–æ—Å—Ç–æ—è–Ω–∏–µ, —Å—á—ë—Ç—á–∏–∫ —Å–±—Ä–∞—Å—ã–≤–∞—Ç—å—Å—è, –∞ –≤ –∫–æ–Ω—Å–æ–ª—å –±—É–¥–µ—Ç –≤—ã–≤–æ–¥–∏—Ç—å—Å—è —Å–æ—Å—Ç–æ—è–Ω–∏–µ —Å–≤–µ—Ç–æ–¥–∏–æ–¥–∞, –∑–Ω–∞—á–µ–Ω–∏–µ —Å—á—ë—Ç—á–∏–∫–∞ –∏ –∏–¥–µ–Ω—Ç–∏—Ñ–∏–∫–∞—Ç–æ—Ä –≤–µ–¥–æ–º–æ–≥–æ —É—Å—Ç—Ä–æ–π—Å—Ç–≤–∞. –ü—Ä–∏–º–µ—Ä –≤—ã–≤–æ–¥–∞ –Ω–∞ –∫–æ–Ω—Å–æ–ª—å: Led status: 1 –ó–∞–∫–ª—é—á–µ–Ω–∏–µ –¢–µ–ø–µ—Ä—å –º–æ–∂–Ω–æ –¥–æ–≤–æ–ª—å–Ω–æ –ø—Ä–æ—Å—Ç–æ —É–ø—Ä–∞–≤–ª—è—Ç—å –Ω–∞—à–∏–º —É—Å—Ç—Ä–æ–π—Å—Ç–≤–æ–º —Å –∫–æ–º–ø—å—é—Ç–µ—Ä–∞, –∏–ª–∏ –¥–∞–∂–µ –Ω–µ—Å–∫–æ–ª—å–∫–∏–º–∏ —É—Å—Ç—Ä–æ–π—Å—Ç–≤–∞–º–∏, —Å–æ–µ–¥–∏–Ω—ë–Ω–Ω—ã–º–∏ –≤ —Å–µ—Ç—å (–Ω–∞–ø—Ä–∏–º–µ—Ä –≤ —Å–ª—É—á–∞–µ —Ç–æ–≥–æ –∂–µ —É–º–Ω–æ–≥–æ –¥–æ–º–∞). –í –±—É–¥—É—â–µ–º —Ç–∞–∫–∂–µ –ø–ª–∞–Ω–∏—Ä—É–µ—Ç—Å—è —Ä–µ–∞–ª–∏–∑–æ–≤–∞—Ç—å –ø–æ–ª–Ω–æ—Ü–µ–Ω–Ω—ã–π —Ä–µ–∂–∏–º –≤–µ–¥—É—â–µ–≥–æ —É—Å—Ç—Ä–æ–π—Å—Ç–≤–∞. –°–ø–∞—Å–∏–±–æ –∑–∞ –≤–Ω–∏–º–∞–Ω–∏–µ! –ò—Å—Ö–æ–¥–Ω—ã–π –∫–æ–¥ –ø—Ä–æ–µ–∫—Ç–æ–≤ –¥–ª—è –ú–ö –∏ –ü–ö –Ω–∞—Ö–æ–¥–∏—Ç—Å—è –≤ –ø—Ä–∏–∫—Ä–µ–ø–ª—ë–Ω–Ω—ã—Ö —Ñ–∞–π–ª–∞—Ö. –ë–∏–±–ª–∏–æ—Ç–µ–∫–∏ USART –∏ Modbus RTU –ª–µ–∂–∞—Ç –Ω–∞ GitHub.
–§–∞–π–ª—ã: –í—Å–µ –≤–æ–ø—Ä–æ—Å—ã –≤ –§–æ—Ä—É–º.
–≠—Ç–∏ —Å—Ç–∞—Ç—å–∏ –≤–∞–º —Ç–æ–∂–µ –º–æ–≥—É—Ç –ø—Ä–∏–≥–æ–¥–∏—Ç—å—Å—è: |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
 |


 |
||||

|
||||

 –î–ª—è –ø–µ—Ä–µ–¥–∞—á–∏ –¥–∞–Ω–Ω—ã—Ö –ø–æ —Ñ–∏–∑–∏—á–µ—Å–∫–∏–º –ª–∏–Ω–∏—è–º —Å–≤—è–∑–∏ PDU –æ–±–æ—Ä–∞—á–∏–≤–∞–µ—Ç—Å—è –≤ –¥—Ä—É–≥–æ–π –ø–∞–∫–µ—Ç - Application Data Unit (ADU) - –∫–æ—Ç–æ—Ä—ã–π –æ—Ç–ª–∏—á–∞–µ—Ç—Å—è –≤ –∑–∞–≤–∏—Å–∏–º–æ—Å—Ç–∏ –æ—Ç –ª–∏–Ω–∏–∏. –í—Å–µ–≥–æ –∏—Ö —Ç—Ä–∏ –≤–∞—Ä–∏–∞–Ω—Ç - Modbus ASCII (—Ç–µ–∫—Å—Ç–æ–≤—ã–π –≤–∞—Ä–∏–∞–Ω—Ç), Modbus TCP (–¥–ª—è –ø–µ—Ä–µ–¥–∞—á–∏ —á–µ—Ä–µ–∑ TCP/IP) –∏ –∏–Ω—Ç–µ—Ä–µ—Å—É—é—â–∏–π –Ω–∞—Å Modbus RTU. ADU –¥–ª—è Modbus RTU –≤–∫–ª—é—á–∞–µ—Ç –≤ —Å–µ–±—è 1 –±–∞–π—Ç –∞–¥—Ä–µ—Å–∞ –≤–µ–¥–æ–º–æ–≥–æ —É—Å—Ç—Ä–æ–π—Å—Ç–≤–∞ –∏ 2 –±–∞–π—Ç–∞ –∫–æ–Ω—Ç—Ä–æ–ª—å–Ω–æ–π —Å—É–º–º—ã CRC:
–î–ª—è –ø–µ—Ä–µ–¥–∞—á–∏ –¥–∞–Ω–Ω—ã—Ö –ø–æ —Ñ–∏–∑–∏—á–µ—Å–∫–∏–º –ª–∏–Ω–∏—è–º —Å–≤—è–∑–∏ PDU –æ–±–æ—Ä–∞—á–∏–≤–∞–µ—Ç—Å—è –≤ –¥—Ä—É–≥–æ–π –ø–∞–∫–µ—Ç - Application Data Unit (ADU) - –∫–æ—Ç–æ—Ä—ã–π –æ—Ç–ª–∏—á–∞–µ—Ç—Å—è –≤ –∑–∞–≤–∏—Å–∏–º–æ—Å—Ç–∏ –æ—Ç –ª–∏–Ω–∏–∏. –í—Å–µ–≥–æ –∏—Ö —Ç—Ä–∏ –≤–∞—Ä–∏–∞–Ω—Ç - Modbus ASCII (—Ç–µ–∫—Å—Ç–æ–≤—ã–π –≤–∞—Ä–∏–∞–Ω—Ç), Modbus TCP (–¥–ª—è –ø–µ—Ä–µ–¥–∞—á–∏ —á–µ—Ä–µ–∑ TCP/IP) –∏ –∏–Ω—Ç–µ—Ä–µ—Å—É—é—â–∏–π –Ω–∞—Å Modbus RTU. ADU –¥–ª—è Modbus RTU –≤–∫–ª—é—á–∞–µ—Ç –≤ —Å–µ–±—è 1 –±–∞–π—Ç –∞–¥—Ä–µ—Å–∞ –≤–µ–¥–æ–º–æ–≥–æ —É—Å—Ç—Ä–æ–π—Å—Ç–≤–∞ –∏ 2 –±–∞–π—Ç–∞ –∫–æ–Ω—Ç—Ä–æ–ª—å–Ω–æ–π —Å—É–º–º—ã CRC:










–Ý–∞–±–æ—Ç–æ—Å–ø–æ—Å–æ–±–Ω–æ—Å—Ç—å —Å–∞–π—Ç–∞ –ø—Ä–æ–≤–µ—Ä–µ–Ω–∞ –≤ –±—Ä–∞—É–∑–µ—Ä–∞—Ö:
IE8.0, Opera 9.0, Netscape Navigator 7.0, Mozilla Firefox 5.0
–ê–¥–∞–ø—Ç–∏—Ä–æ–≤–∞–Ω –¥–ª—è —Ä–∞–±–æ—Ç—ã –ø—Ä–∏ —Ä–∞–∑—Ä–µ—à–µ–Ω–∏—è—Ö —ç–∫—Ä–∞–Ω–∞ –æ—Ç 1280—Ö1024 –∏ –≤—ã—à–µ.
–ü—Ä–∏ –º–µ–Ω—å—à–∏—Ö —Ä–∞–∑—Ä–µ—à–µ–Ω–∏—è—Ö –≤–æ–∑–º–æ–∂–Ω–æ –ø–æ—è–≤–ª–µ–Ω–∏–µ –≥–æ—Ä–∏–∑–æ–Ω—Ç–∞–ª—å–Ω–æ–π –ø—Ä–æ–∫—Ä—É—Ç–∫–∏.
–ü–æ –≤—Å–µ–º –≤–æ–ø—Ä–æ—Å–∞–º –æ–±—Ä–∞—â–∞–π—Ç–µ—Å—å –∫ –ö–æ—Ç—É: kot@radiokot.ru
©2005-2026